Environment monitoring is an essential application in wireless sensor networks. We consider a large area surveillance in which a monitored region is divided into small sub areas where sensors, sinks, and mobile robots are responsible for surveillance jobs. Sensors collect data from the environment for specific monitoring purposes. Sinks are usually stationary and responsible for collecting regional information, while mobile robots are always patrolling the monitored areas to handle events. Under the above scenario, we propose anti-inspired digital pheromone to classify priorities of events used in a proposed patrolling algorithm, in which, mobile robots are patrolling and handling events with priorities along the roads. Events with higher priorities are handled with higher priorities, while productive event handling, i.e., handling more events, is also the goal. Extensive simulations are conducted to study the efficiency of the proposed method.
The full paper can be found here.
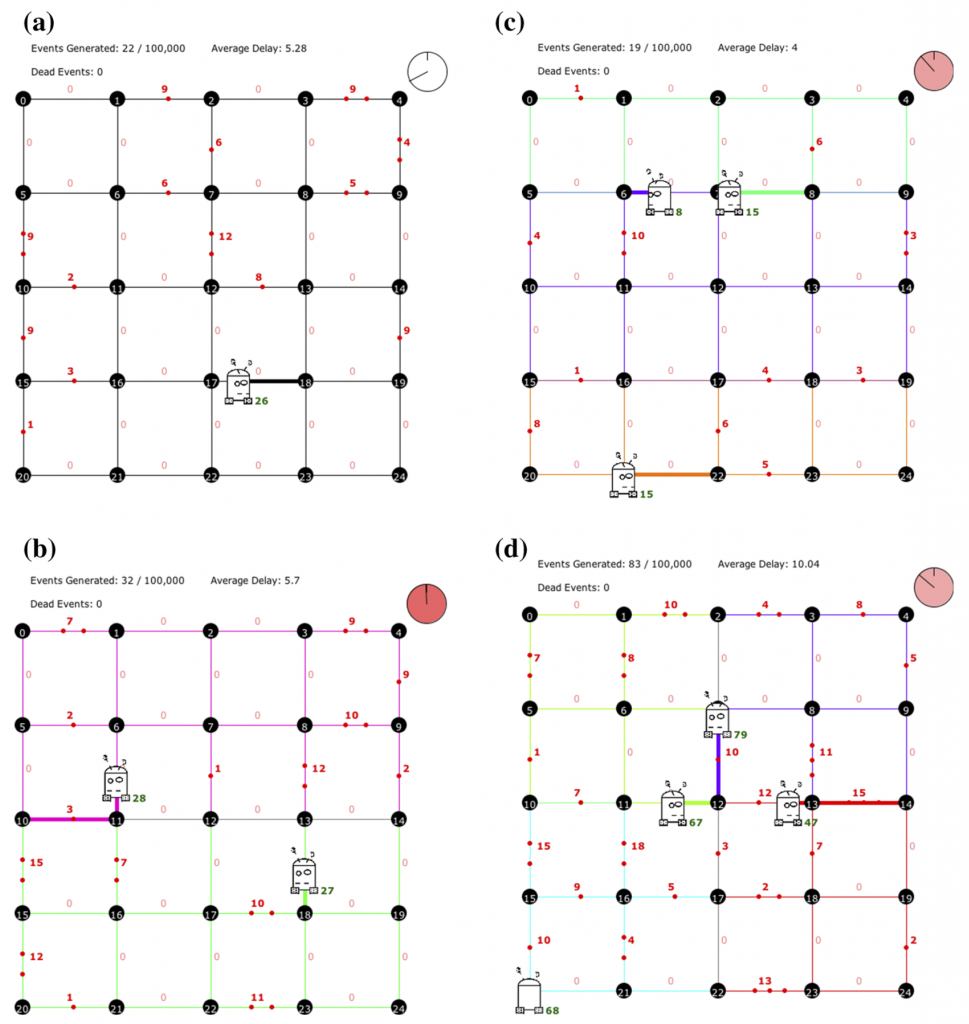
Fig. 27 Simulation topology with multiple robots. a One robot with the whole area as its responsible area. b Two robots with each one’s responsible area and sharing a boundary. c Three robots with each one’s responsible area and sharing boundaries. d Four robots with each one’s responsible area and sharing boundaries
PatrollingSchemeDesign10,112 total views, 3 views today